
在MCU上跑的操作系统,该如何选择?
RTOS核心:调度和分割
基本通信
资源管理
保护RTOS
可感知OS的调度器
本篇文章来源于微信公众号: AI电堂
小猿/猿辅导 |
iFlytek/科大讯飞 |
大上科技/Dasung |
BOOX/文石 |
PocketBook |
Bigme/大我 |
作业帮/喵喵机 |
Supernote/超级笔记 |
Havon/汉王科技 |
Obook/国文 |
iReader/掌阅 |
小米旗舰店 |
Maxhub |
得到阅读器 |
evernote/印象笔记 |
Moan/墨案 |
秒秒测 |















深度测评:小猿智能练习本S1,到底值不值得买?
3.1寸触控墨水屏,喵喵智能学习卡Q1体验,九种语言+全科辅助

得到阅读器F7体验 硬件与内容皆是大满贯!
孩子口袋里的全科老师,喵喵机智能学习卡Q1评测-点击文章可购买
跃居第一:华为 MatePad Paper 成 Q3 季度中国市场最火电子书

实用的办公好物,汉王N10手写电纸本更值得推荐
年轻人的第一台生产力利器—科大讯飞智能办公本 Air 体验
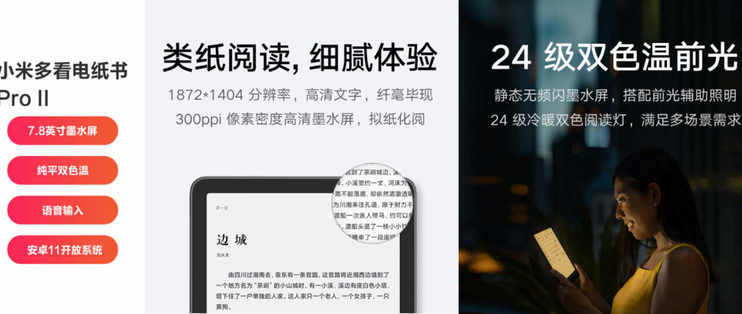
大屏大容量,看得就是爽:小米7.8英寸墨水屏多看电纸书特点。
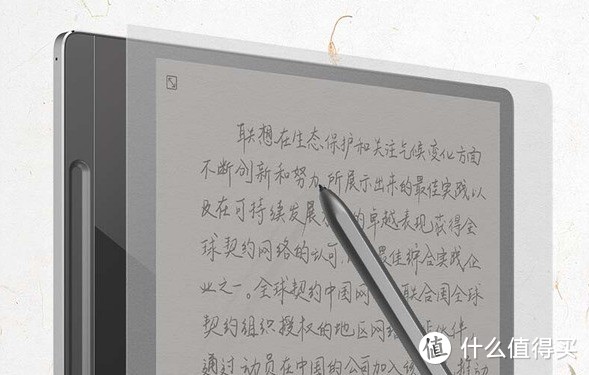
联想YOGA Paper 墨水屏电子书开启预售:10.3英寸大屏2699元

海信A7经典版 6.7寸墨水屏手机阅读器秒杀价1299元,快上车!

阅读手机A9,碎片化阅读时代的读书新姿势

阿尔法蛋听说宝 3.7寸墨水屏双语复读机英语学习机听力宝磨耳朵学习神器随身听

科大讯飞(iFLYTEK) 智能办公本X2 10.3英寸电纸书墨水屏平板电子书阅读器笔记本电子阅读器
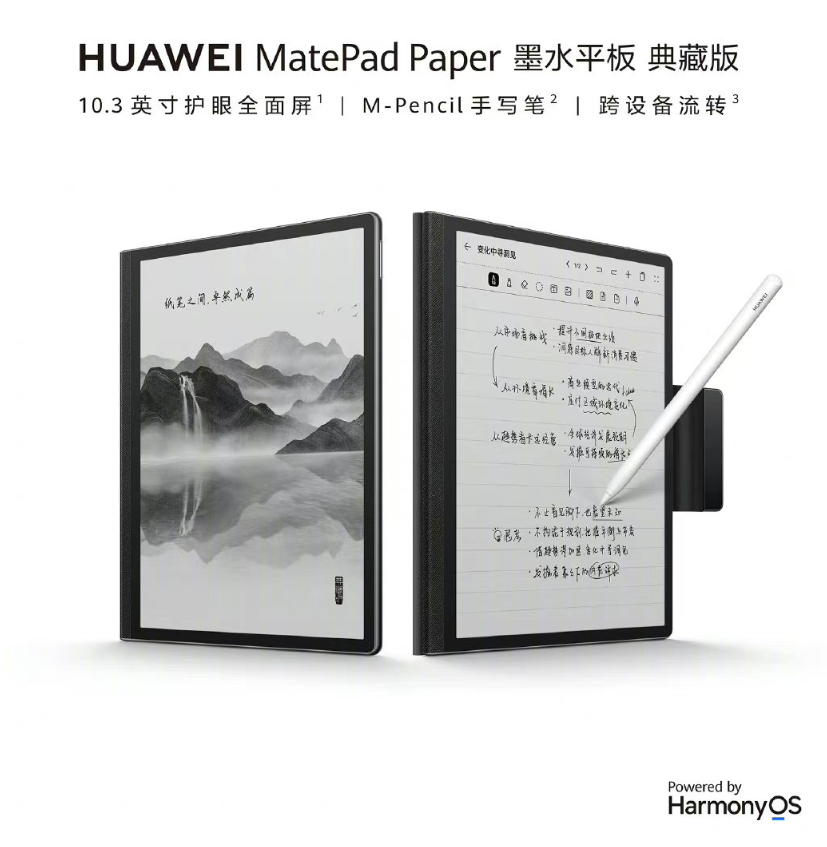
华为墨水平板典藏版发布:搭载元太10.3吋墨水屏,支持LTE连接,售价4999元
